【C8T6+A4988步进驱动 2相4线 42步进电机+源码】 |
您所在的位置:网站首页 › stm32 pwm波控制步进电机 双电机 › 【C8T6+A4988步进驱动 2相4线 42步进电机+源码】 |
【C8T6+A4988步进驱动 2相4线 42步进电机+源码】
|
项目要求
所需要的元器件
A4988步进驱动 与2相4线 42步进电机接线
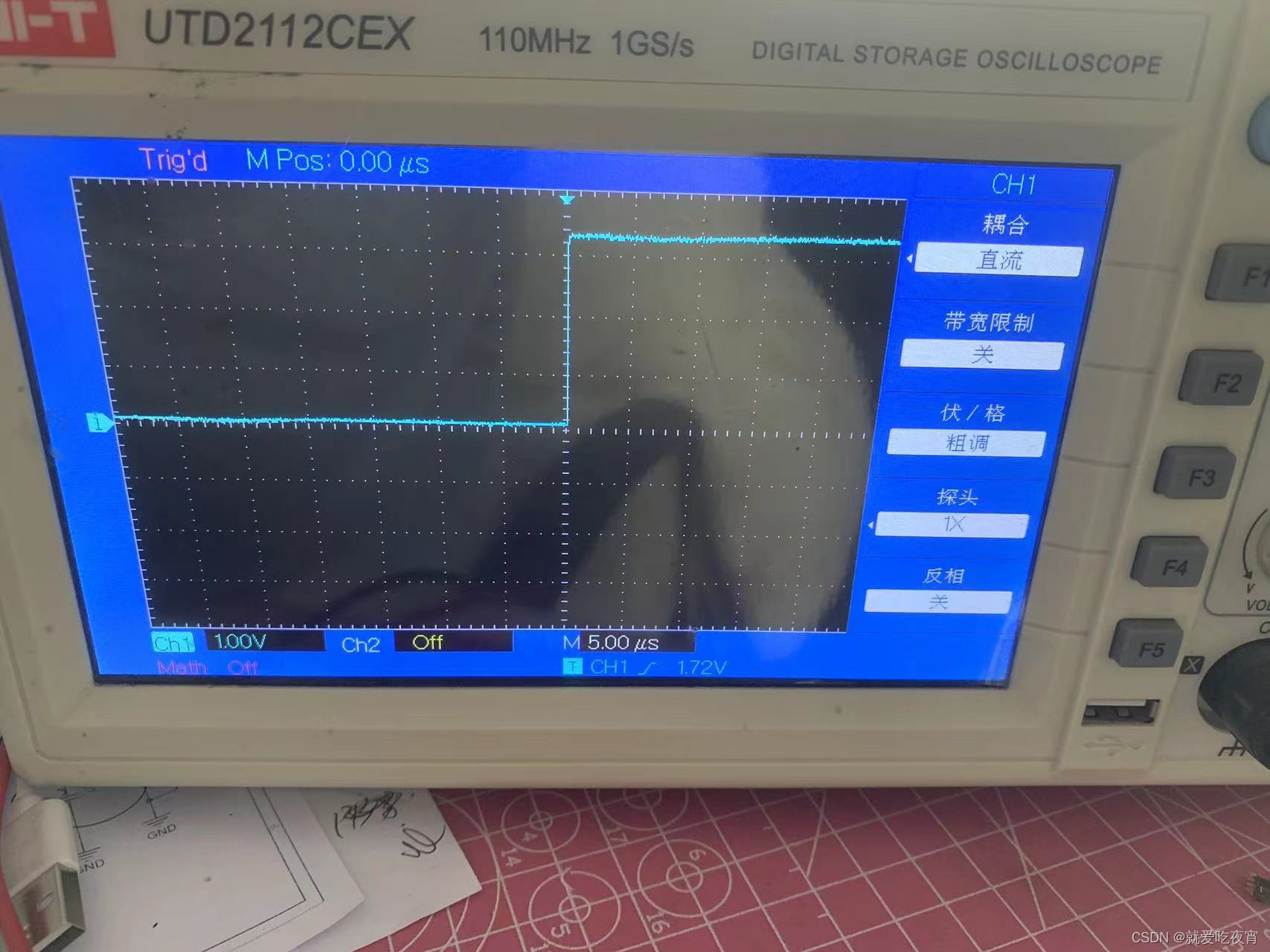
(第一种方法)不用定时器驱动42步进电机(第二种方法)用定时器驱动42步进电机通过外部中断对电机进行停止上位机控制电机开启关闭上位机发送命令效果示波器波形展示
项目要求
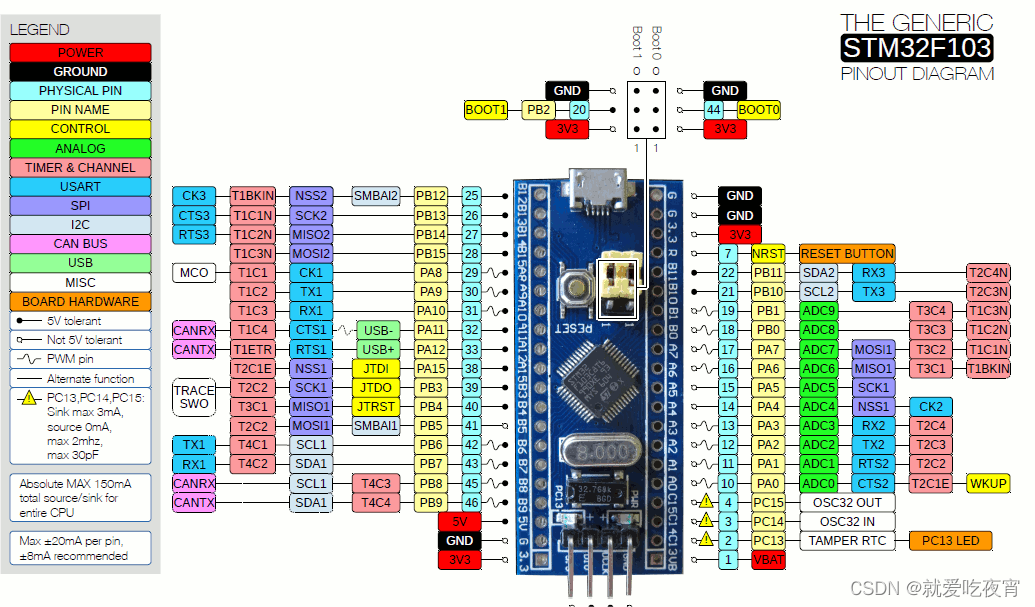
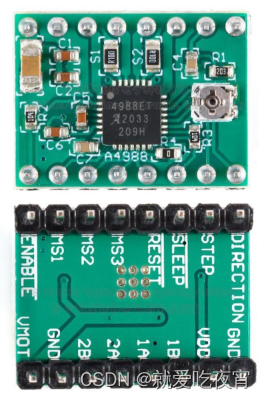
本项目通过stm32f1为核心的最小系统板控制42步进电机,可以通过按键的开关对电机进行实时的控制,也可以通过上位机发送的串口命令对电机进行控制,本项目用到了定时器、外部中断、串口收发等。 所需要的元器件1、STM32F103C8T6最小系统核心板 2、A4988步进驱动
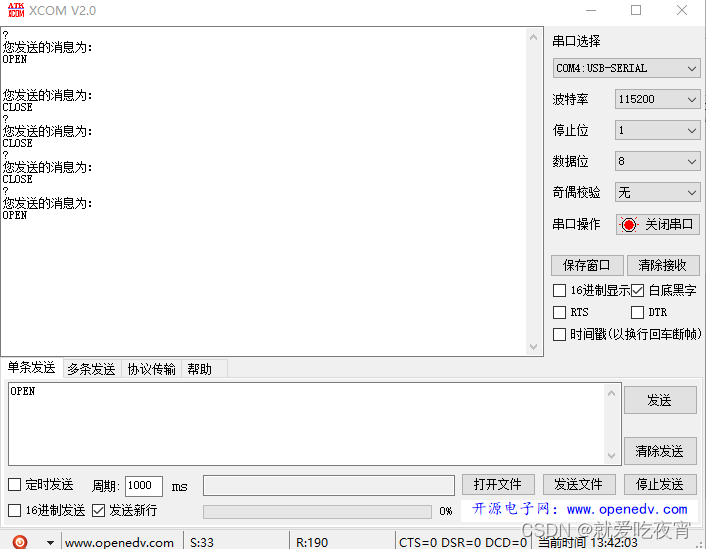
A4988步进驱动 2相4线 42步进电机 A4988步进驱动接线定义: A4988 开发板GND --GND DIR-- PB9方向 开发板3.3V --VDD STEP-- PB5脉冲信号 A --1B SLEEP-- VCC3.3V C --1A RESET-- VCC3.3V D --2A MS3-- PB12 B --2B MS2-- PB11 外接电源GND --GND MS1-- PB10 外接电源VCC --VMOT ENABLE-- PB13控制抱死 (第一种方法)不用定时器驱动42步进电机下面展示一些 内联代码片。 // A code block var foo = 'bar'; // An highlighted block //参数 dir:FALSE正转TRUE反转 //period 周期 //step 脉冲 void Step_Control(u8 dir,u16 period,u32 steps) { u32 i; for(i=0; i TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断 NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 TIM_Cmd(TIM3, ENABLE); //使能TIMx外设 } //定时器3中断服务程序 void TIM3_IRQHandler(void) //TIM3中断 { if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源 { TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源 } } //TIM3 PWM部分初始化 //PWM输出初始化 //arr:自动重装值 //psc:时钟预分频数 void TIM3_PWM_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟 GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB8 //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.8 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO //初始化TIM3 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 //初始化TIM3 Channel2 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 //TIM_Cmd(TIM3, ENABLE); //使能TIM3 TIM_Cmd(TIM3, DISABLE); //不使能TIM3 }在这里我们通过定时器3,对PB5输出大小为50Mhz的方波,对steps引脚进行驱动,这种方式的好处就是,即使电机在运转,也可以通过上位机发送命令。 上位机控制电机开启关闭下面展示一些 内联代码片。 // A code block var foo = 'bar'; // An highlighted block void Send_data_control() { if(USART_RX_STA&0x8000) { len=USART_RX_STA&0x3fff;//得到接收到的数据长度 printf("\r\n您发送的消息为:\r\n\r\n"); for(t=0;t TIM_Cmd(TIM3, ENABLE); //使能TIM3 } if(!(strcmp((char*)USART_RX_BUF,"CLOSE"))) { NVIC_SystemReset(); // 执行软复位,重新启动处理器 } } }直接通过使能定时器3,来开启电机运转 通过外部中断对电机进行停止下面展示一些 内联代码片。 // A code block var foo = 'bar'; // An highlighted block // 外部中断处理函数 void EXTI4_IRQHandler(void) { if (EXTI_GetITStatus(EXTI_Line4) != RESET) { // 处理外部中断事件 // ... EXTI_ClearITPendingBit(EXTI_Line4); // 清除中断标志位 NVIC_SystemReset(); // 执行软复位,重新启动处理器 } } 上位机发送命令效果
|
 3、2相4线 42步进电机
3、2相4线 42步进电机 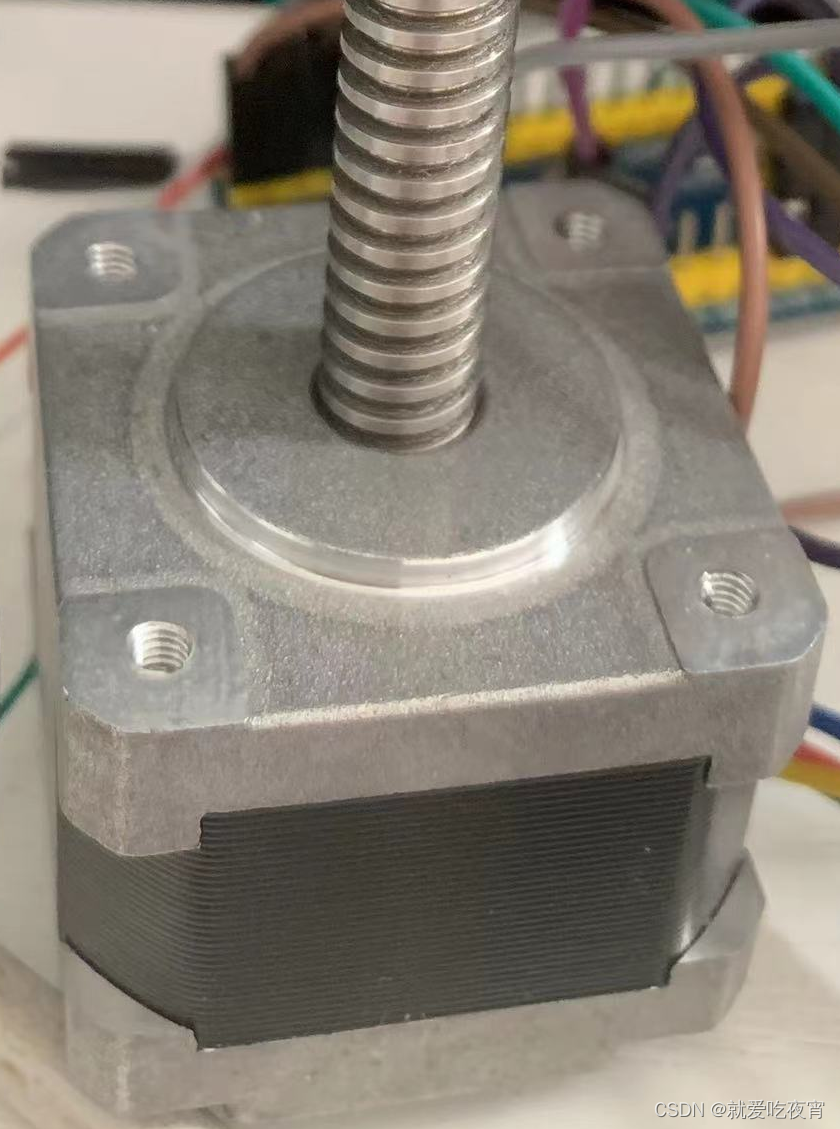 4、2个微动开关(分别负责控制电机开始和停止)
4、2个微动开关(分别负责控制电机开始和停止) 5、12V的电源
5、12V的电源  6、检测电机输出波形的示波器
6、检测电机输出波形的示波器 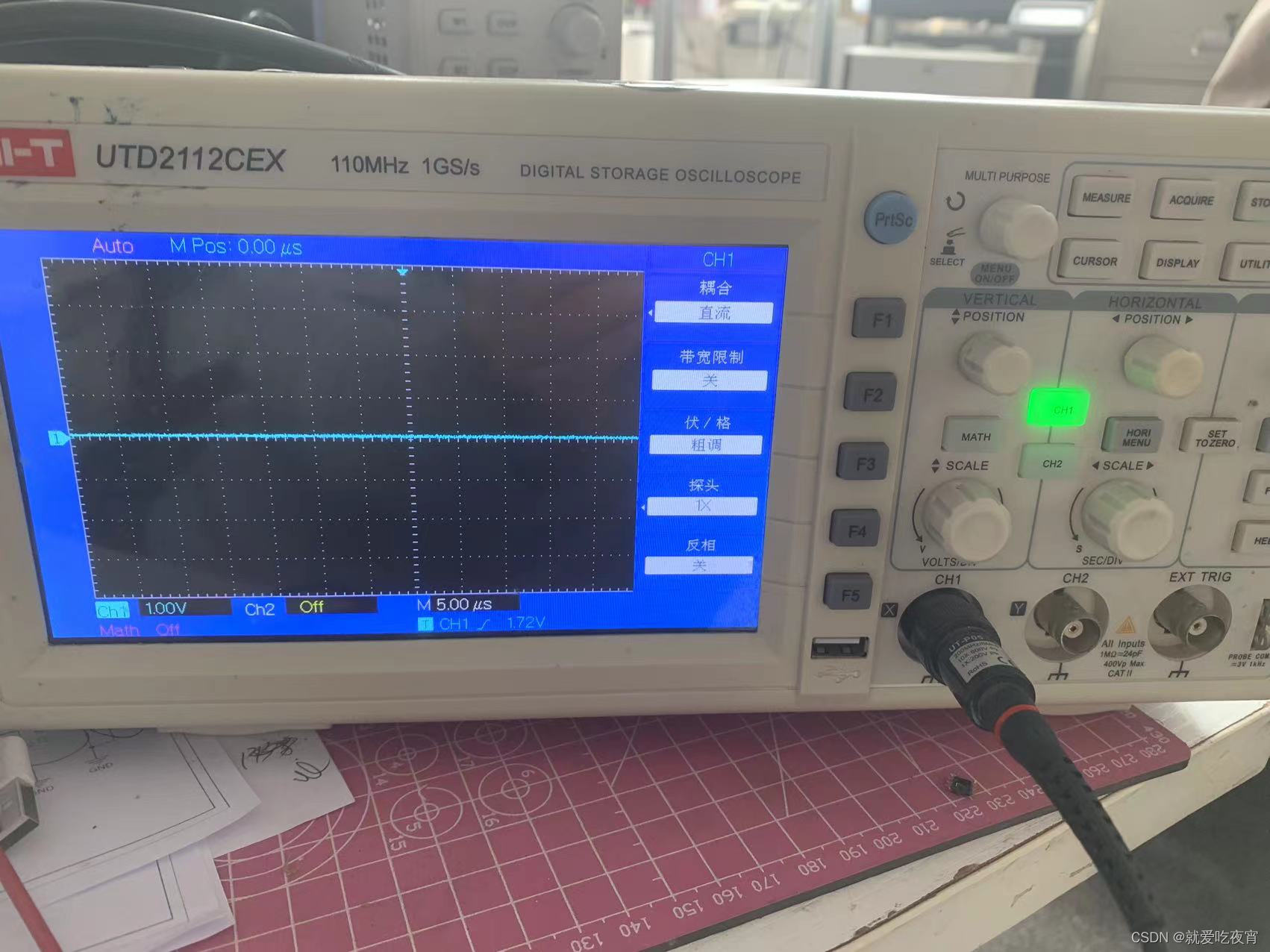
 本项目开源,有需要借鉴的可以评论,发链接。
本项目开源,有需要借鉴的可以评论,发链接。【本文地址】
今日新闻 |
推荐新闻 |